We remain fully operational. Our teams are working around the clock to ensure your deliveries continue safely.
DOWNLOAD THE APP


Customer Services
Copyright © 2025 Desertcart Holdings Limited
DOWNLOAD THE APP
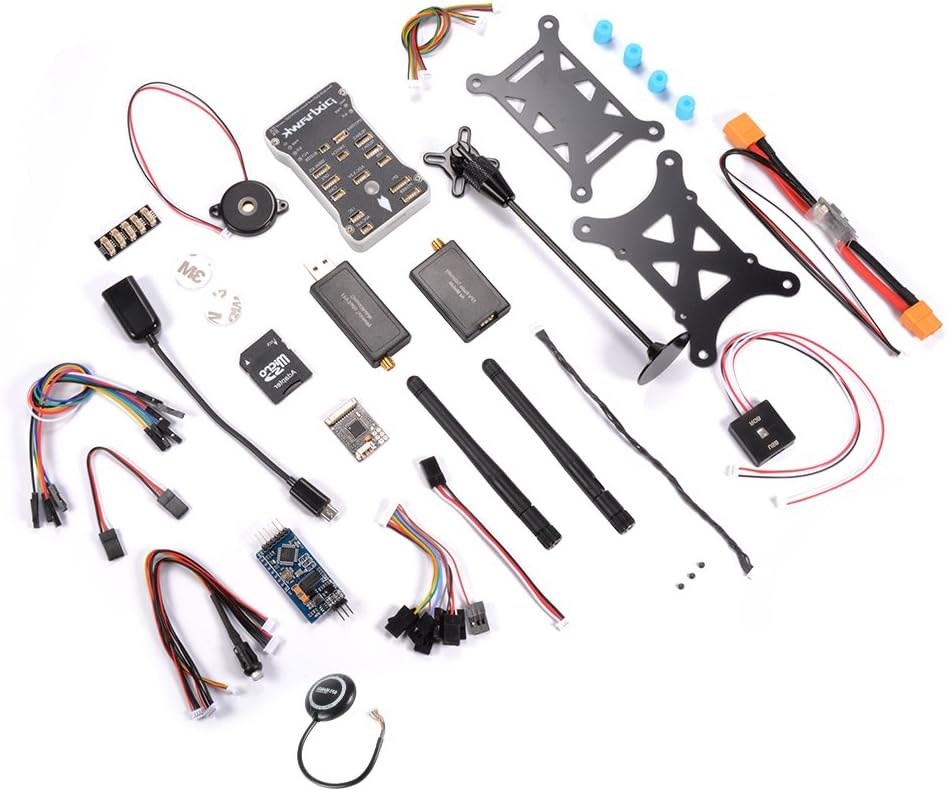

Features: Advanced 32 bit ARM CortexM4 high performance processer, can operate NuttX RTOX real time operation system. 14 PWM/ Servo Output. Bus interface(UART,I2C,SPI,CAN). Integrated back up power and lose efficacy controller, main controller lose efficacy can safely alter to back up control. Providing automatic and manual mode. Providing redundant power supply input and failover. Providing multi sound buzzer interface. Note: This self-assembly DIY kit suitable for RC players who have a certainly assembly ability, may not fit to a beginner. Specifications: Processor: 32 bit 2M flash memory STM32F427 Cortex M4, with hardware floating point processing unit Main frequency: 168MHZ,256K RAM 32 bit STM32F103 back up processor Sensor: L3GD20 3 axis digital 16 bit gyroscope LSM303D 3 axis 14 acceleration/magnetometer MPU6000 6 axis acceleration/magnetometer MS5611 high precision barometer Interface: 5 UART, one compatible high voltage, two have hardware flow control Two CAN DSM/ DSM2/ DSM-X satellite receiver compatible input Futaba SBUS compatible input and output PPM signal input RSSI(PWM or voltage) output I2C SPI 3.3 and 6.6VADC input External MICRO USB interface Package Includes: 1 x Pixhawk PX4 2.4.6 32bit ARM Flight Controller with shell 1 x Anti-vibration set for pix board 1 x PPM Module 1 x GPS Foldable Antenna Frame 1 x External LED Light Board 1 x NEO-M8N GPS 1 x Power Module (XT60-plug) 1 x Pixhawk-I2C Splitter Expand Board 1 x 3DR Radio 915MHz Data Transmission Module 1 x minimOSD 1 x Buzzer 1 x Micro-SD Adapter 1 x USB (female) to micro-USB (male) Cable
W**.
Im having trouble getting the Mavlink to work but thats ...
Im having trouble getting the Mavlink to work but thats probably because of my ignorance. You definitely need to have computer skills to make this stuff work.
Trustpilot
2 months ago
2 weeks ago